
Securing Software Supply Chains Explained | SSTC Online Software supply chains touch every line of…
Systems Engineering & Integration

Continue Reading
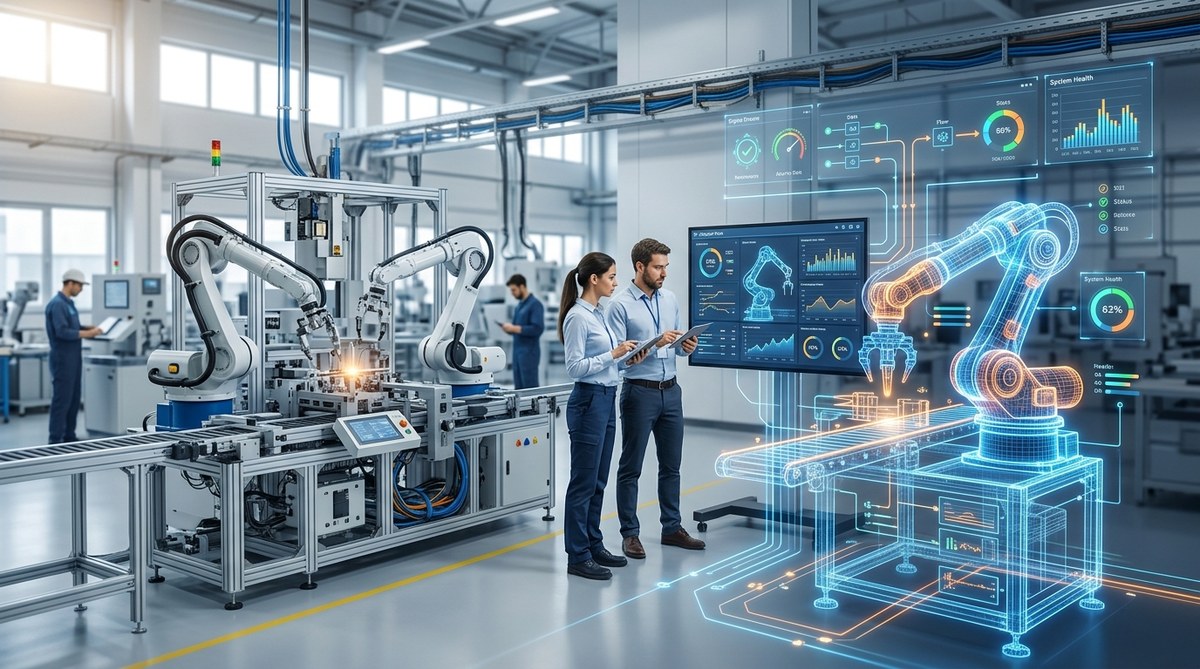
How Digital Twins Improve System Performance
How Digital Twins Improve System Performance Digital twins are more than a buzzword. They are…
Software Engineering & Development Practices

Continue Reading
What Is Chaos Engineering and Why It Matters
What Is Chaos Engineering and Why It Matters Chaos engineering may sound like a risky…
Software Engineering & Development Practices


Continue Reading
Optimizing Developer Experience To Boost Team Productivity
Optimizing developer experience is a critical strategy for improving team productivity and morale. When developers…
Software Engineering & Development Practices
Continue Reading
Managing Microservice Traffic With Service Mesh Technology
In modern software architectures, managing microservice traffic has become a critical concern for engineering teams….
Software Engineering & Development Practices

Continue Reading
Using Real Time Clocks to Detect Regional Drift in Global Systems
Large software systems rarely operate inside a single geographic boundary. Services span continents, data centers…
Emerging Technologies & Innovations
Continue Reading
Why Systems Engineers Are Migrating From C++ To Rust
In recent years, many systems engineers have been migrating from C++ to Rust to address…
Software Engineering & Development Practices

Continue Reading
Turning Engineering Walkthrough Videos Into Formal SOPs
Engineering teams record everything. Architecture deep dives. Incident retrospectives. Platform onboarding sessions. Design reviews with…
Emerging Technologies & Innovations

Continue Reading
Automating Engineering Workflows With AI Agents
In today’s fast-paced engineering environment, automating engineering workflows has become essential for teams looking to…
Software Engineering & Development Practices

Continue Reading
Designing Decoupled Systems With Event-Driven Architecture
Designing decoupled systems has become essential in modern software development, particularly as applications grow in…